Field Robotics
Overview
Field robotics deals with the fundamentals and applications of mobile robots operating in unstructured and dynamic environments, where conditions cannot be controlled. Applications include, but are not limited to: precision agriforestry, construction, space exploration, and industrial inspection. Our research focuses on the development of novel algorithms for perception, planning and control of mobile robots (tracked, wheeled, legged), parameter modeling and system identification (e.g., slippage in tracked robots on slopes), as well as novel unconventional robot designs (e.g., roped-legged).
Cooperative Aerial Manipulation
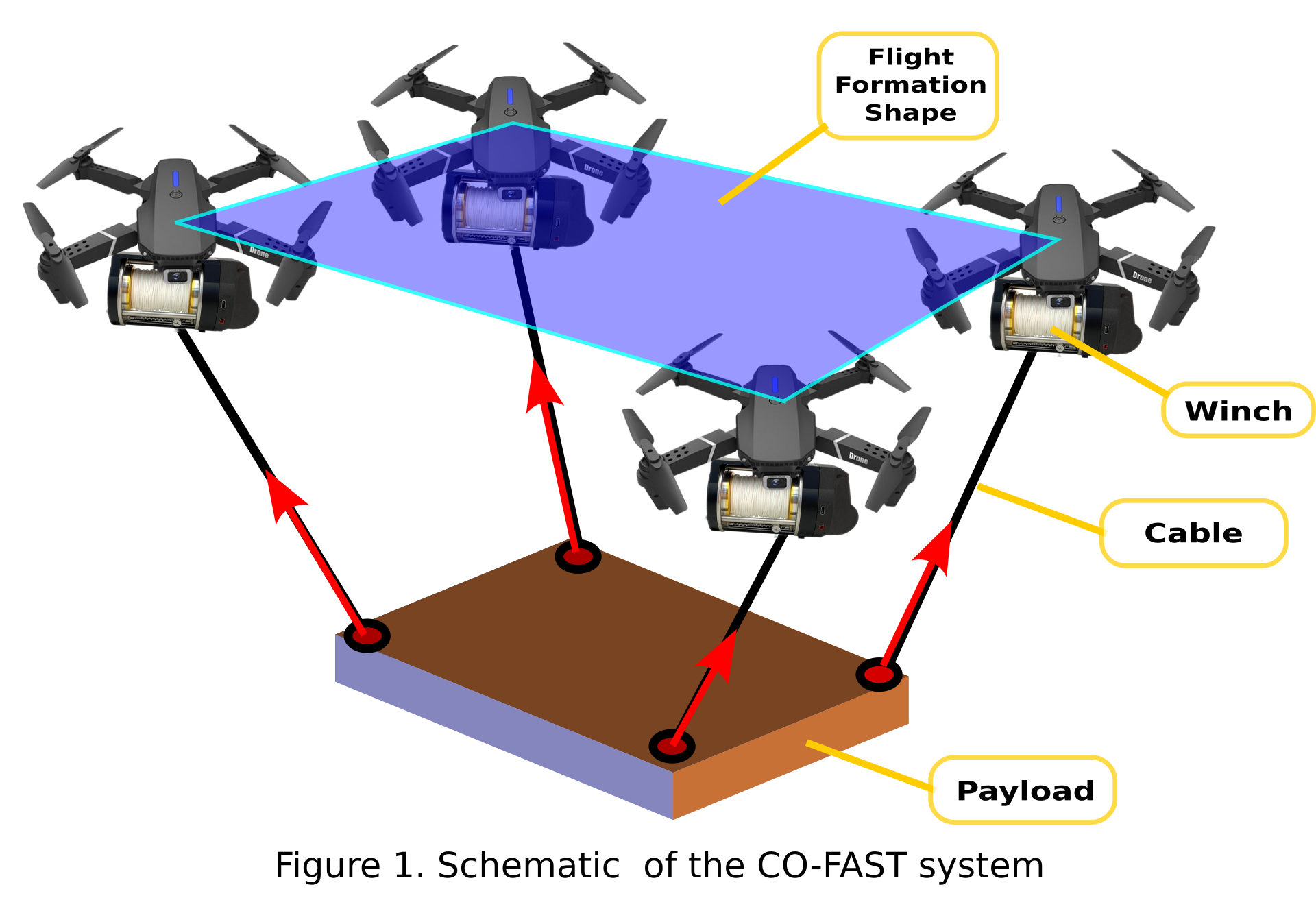
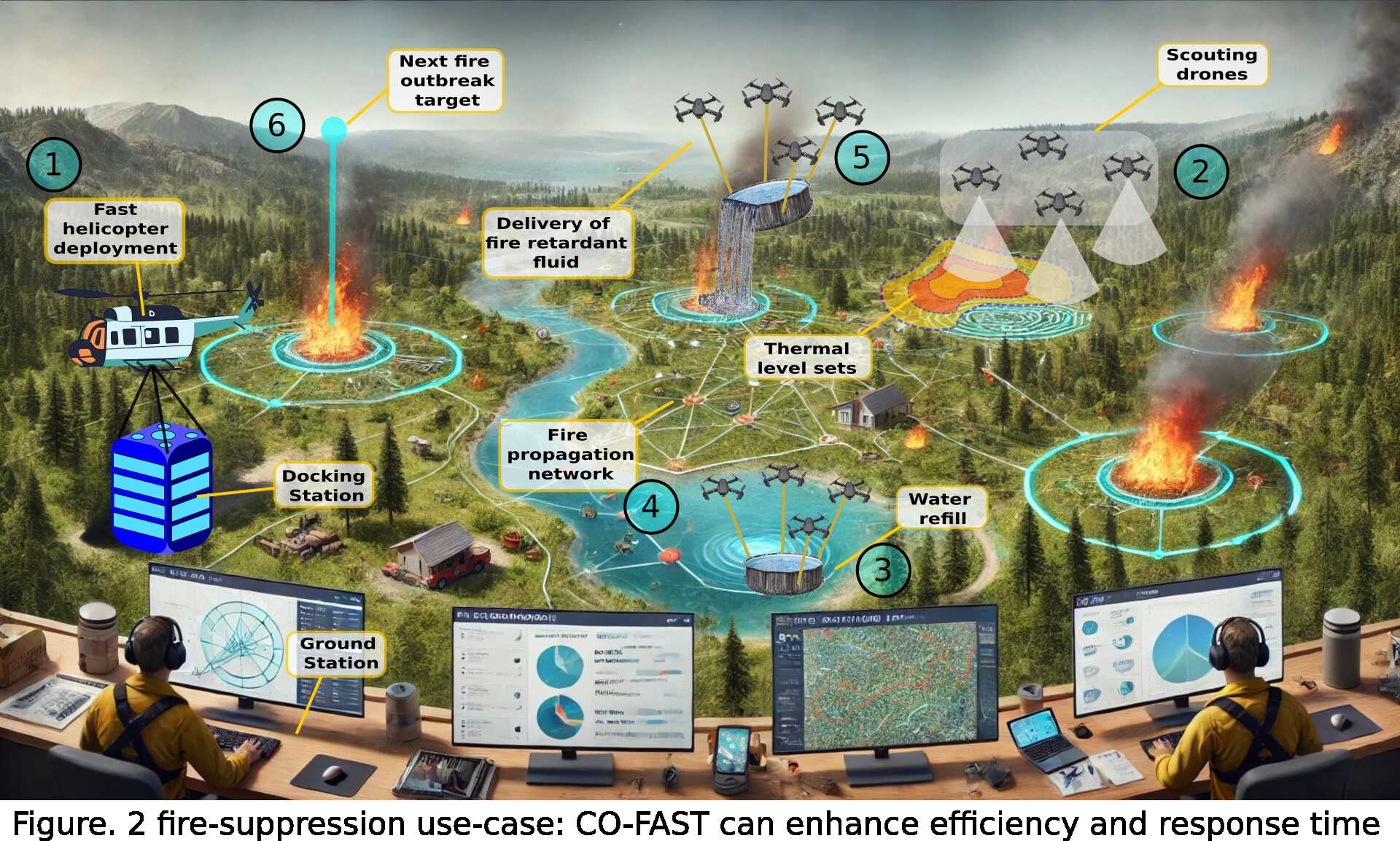
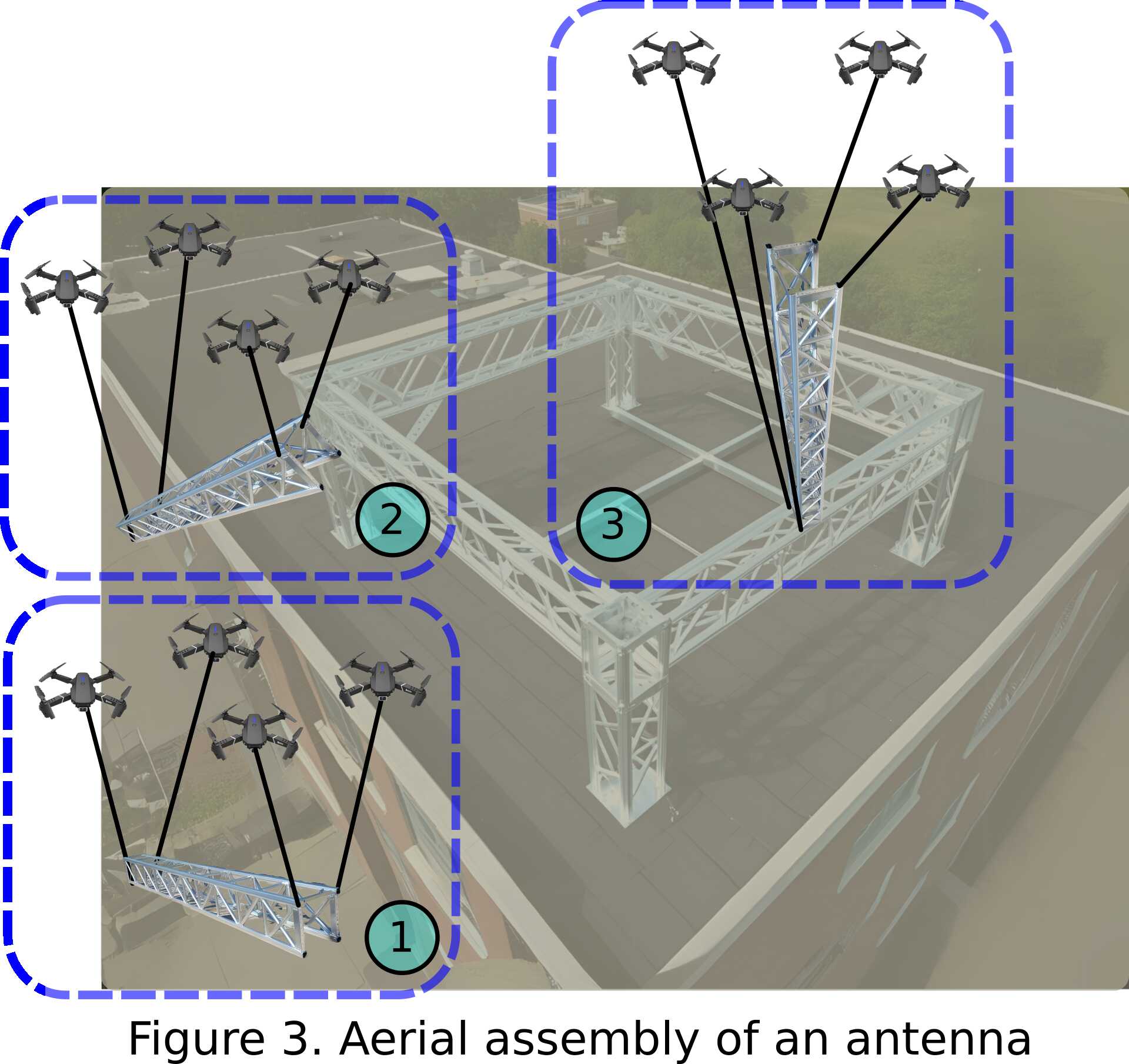
CO-FAST, standing for “Cooperative and Optimization-based Framework for Aerial Manipulation,” introduces a complete framework for the control and planning of cooperative aerial manipulation using swarms of drones connected to loads through motorized cables. Each drone (UAV) is equipped with electrically driven winches that allow adjustment of cable lengths to manipulate the load. This configuration forms a floating-base parallel kinematic structure enabling precise 6D manipulation while simplifying swarm formation control. The ability to adjust cable lengths introduces additional degrees of freedom, allowing load manipulation (such as orientation or height variations) to be decoupled from the swarm flight configuration. Furthermore, the capability to dynamically modify swarm geometry increases robustness against environmental disturbances such as wind and turbulence, improves aerodynamic efficiency inspired by bird flocking behavior, and enables modulation of the overall system stiffness. This feature provides unprecedented positioning accuracy when required, while also enabling acceleration and deceleration of the load without inducing unwanted oscillations. CO-FAST can enable innovative wildfire suppression strategies and has applications in transportation, handling, and automated assembly of loads in construction sites and remote areas.
Control and Planning of Tracked Vehicles
Tracked vehicles distribute their weight continuously over a large surface area (the tracks). This distinctive feature makes them the preferred choice for vehicles required to traverse soft and uneven terrain. From a robotics perspective, however, this flexibility comes at a cost: the complexity of modelling the system and the resulting difficulty in designing theoretically sound navigation solutions. In this research we aim to bridge this gap by proposing a framework for the navigation of tracked vehicles, built upon three key pillars. The first pillar comprises two models: a simulation model and a control-oriented model. The simulation model captures the intricate terramechanics dynamics arising from soil-track interaction and is employed to develop faithful digital twins of the system across a wide range of operating conditions. The control-oriented model is pseudo-kinematic and mathematically tractable, enabling the design of efficient and theoretically robust control schemes. The second pillar is a Lyapunov-based feedback trajectory controller that provides certifiable tracking guarantees. The third pillar is a portfolio of motion planning solutions, each offering different complexity-accuracy trade-offs.
Hybrid Aerial Locomotion
Legged robots have superior mobility than wheeled vehicles on rough terrain, however thy reach their limits when facing obstacles size beyong they leg reach. A jumping strategy can be a solution in those cases. However, jump length and height is severely limited by actuator bounds. In this research we augment a quadruped with a thruster backpack that unlocks unprecendented jumps magnitudes, like in a low-gravity environment. The impulsive and limited-in-time nature of the thrust allows the actuators to be under-sized and therefore more compact, while still extracting the same amount of power by over-volting the drivers and monitoring coil temperature. This approach opens a new research direction termed hybrid aerial locomotion, where flying phases are seamlessly alternated with terrestrial locomotion, combining the agility and efficiency of legged robots with the obstacle-crossing capabilities of aerial systems.

Prototyping and Development of Climbing Robots
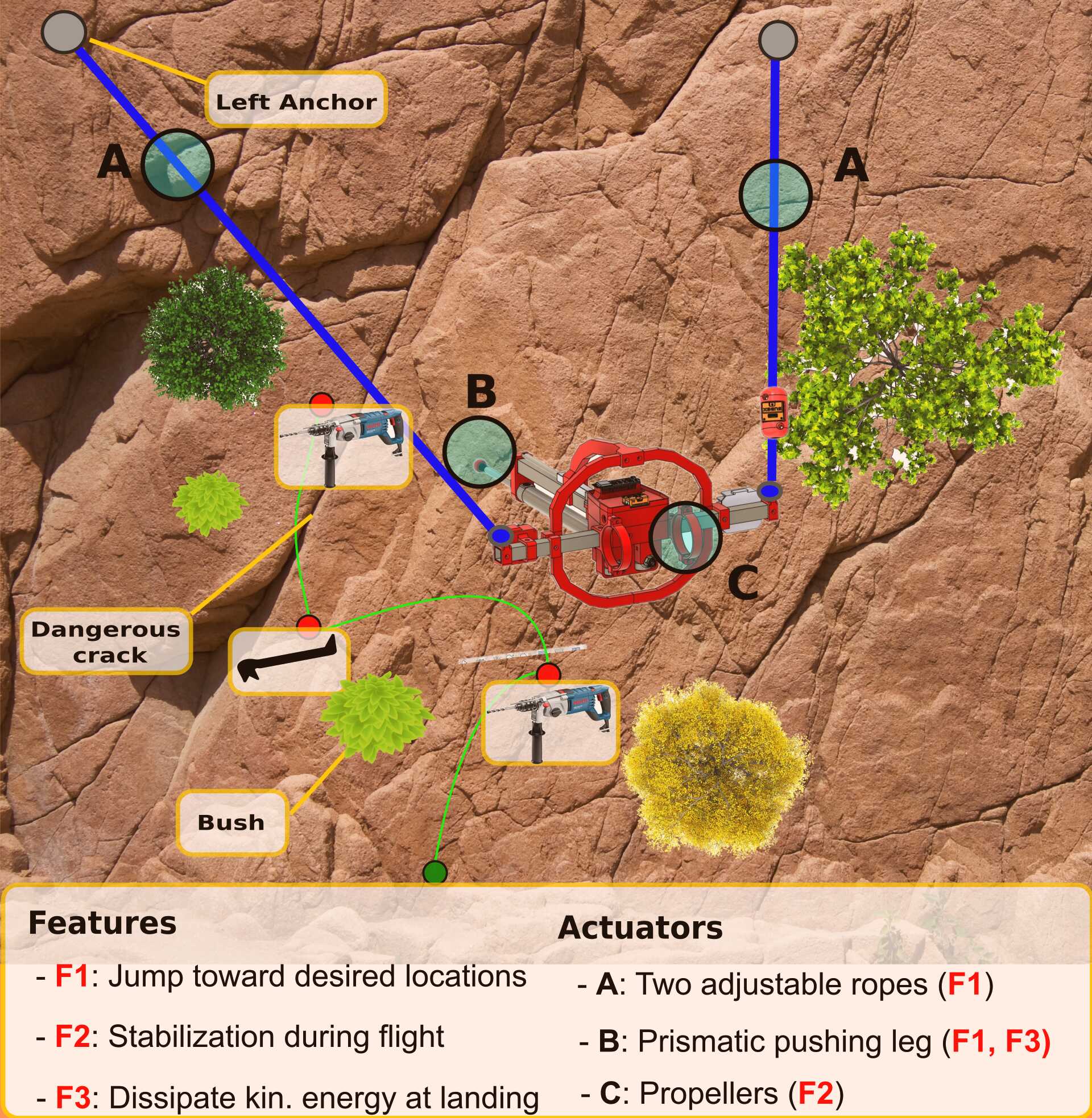
In addition to theoretical research, our group is also involved in the prototyping and development of advanced robotic systems designed for a variety of applications. One of these projects is the creation of a climbing robot, Alpine, developed with the goal of reducing human presence in difficult or hazardous environments.
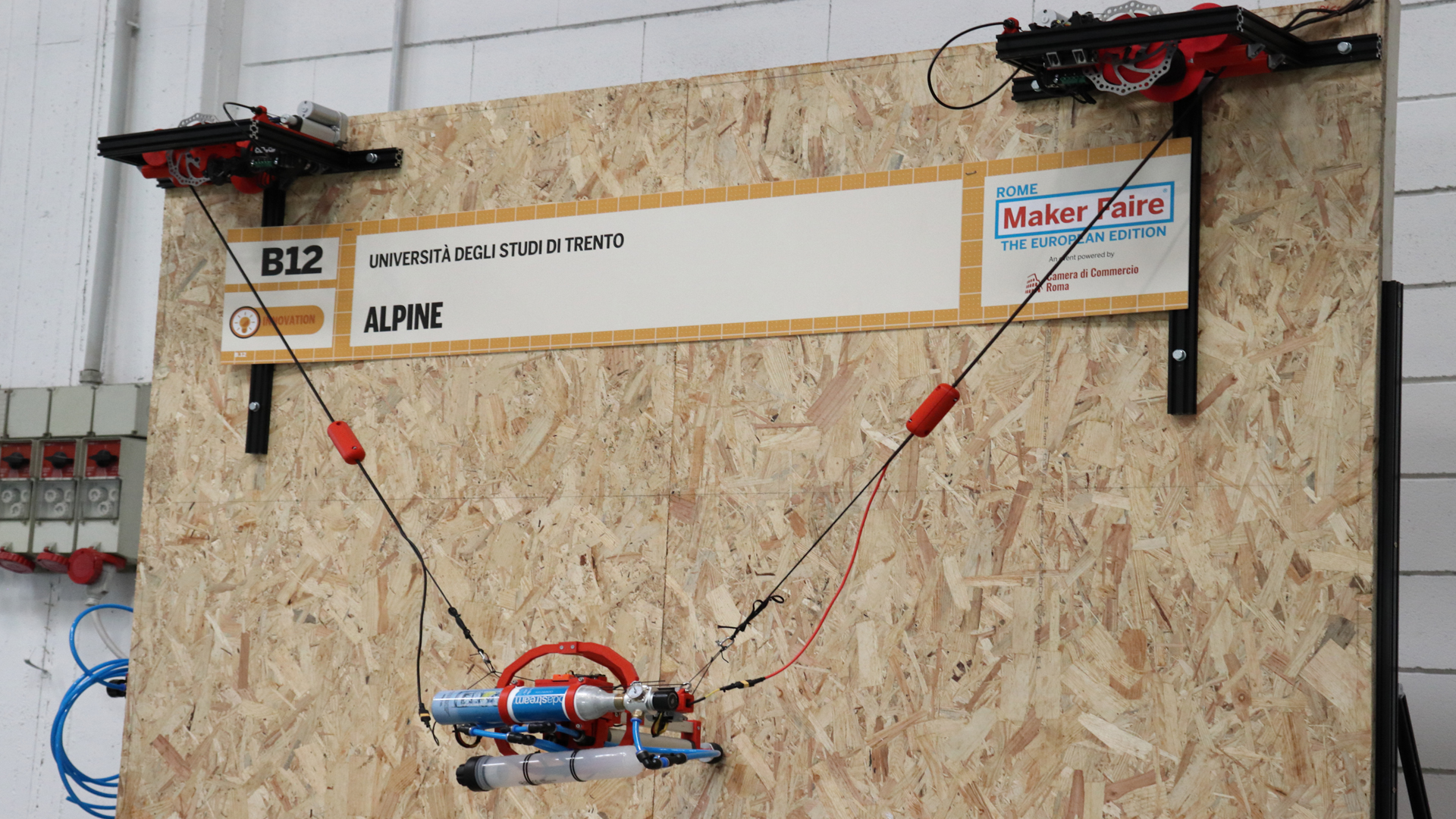
By implementing advanced optimization systems, the robot is capable of avoiding obstacles and navigating complex environments in a semi-autonomous or fully autonomous manner. This system enables analysis, maintenance, and inspection operations in high-risk environments such as rock walls,is specifically designed to carry heavy tools, remain stationary without consuming energy, thereby minimizing direct human exposure to extreme conditions. The development of this prototype required the integration of multiple multidisciplinary skills, including:
- Mechanical engineering: design and construction of the climbing robot structure, involving knowledge of pneumatics, applied physics, and 3D modeling.
- Electronics and mechatronics: selection and integration of sensors and actuators necessary for the robot’s operation and stability.
- Computer science and robotics: development of control and navigation software, including computer vision algorithms for environment recognition, surface classification, and foreign object detection, as well as optimization algorithms for path planning.
- Supervision and remote control systems: development of a web application for real-time monitoring and remote operation of the robot, allowing operators to supervise tasks and intervene safely and efficiently.

An explanatory video of the project can be found here.
The webpage of the WIKI of the project can be found here: https://github.com/alpine-robot.
The Climbing Robot Team
- Michele Focchi - Professor
- Ruben Malacarne - Student
- Luca Hardonk - Student
Michele Focchi
Associate Professor
Passionate researcher in legged robotics, with applications to inspection, load handling and maintenance.
Andrea Del Prete
Associate Professor
My research interests include robotics, optimal control and safe reinforcement learning.
Pietro Noah Crestaz
PhD Student
My research interests include reinforcement learning and legged locotion.
Elisa Alboni
PhD Candidate
My research interests include Reinforcement Learning and Trajectory optimization.
Luigi Palopoli
Full Professor in Robotics
Researcher in the application of AI to social and rehabilitation robotics
Daniele Fontanelli
Full Professor of Measurements and Robotics
Passionate researcher in distributed measurements for robotics application in the field of manufacturing, healthcare and agrifood.